The Good, the meh and the bad.
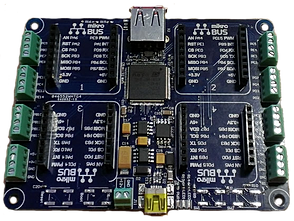
These boards are for the DistoMatic mainboards to inteface with
Parallax Ping )))))) ultrasonic sensors.
tl;dr version:
Good news : Got my KiCad designed DistoMatic boards in the mail.
Meh news : Throughhole pads are not on both top and bottom as they are in Eagle by default.
Bad news: Either the labels are wrong or my pins are in the wrong order in relation to the Ping )))))))).
The Meh
With Eagle, when you place a throughhole connector, it defaults to puttin the pin pads (where you apply
solder to) to both top and bottom. Below is the property for the 3 hole connector - notice there's no selection of which PCB layer put the pads on.
Contrast that property window with the one below, which is for the trace (the path for the current to go through on the board) which is set to be placed on the bottom layer.
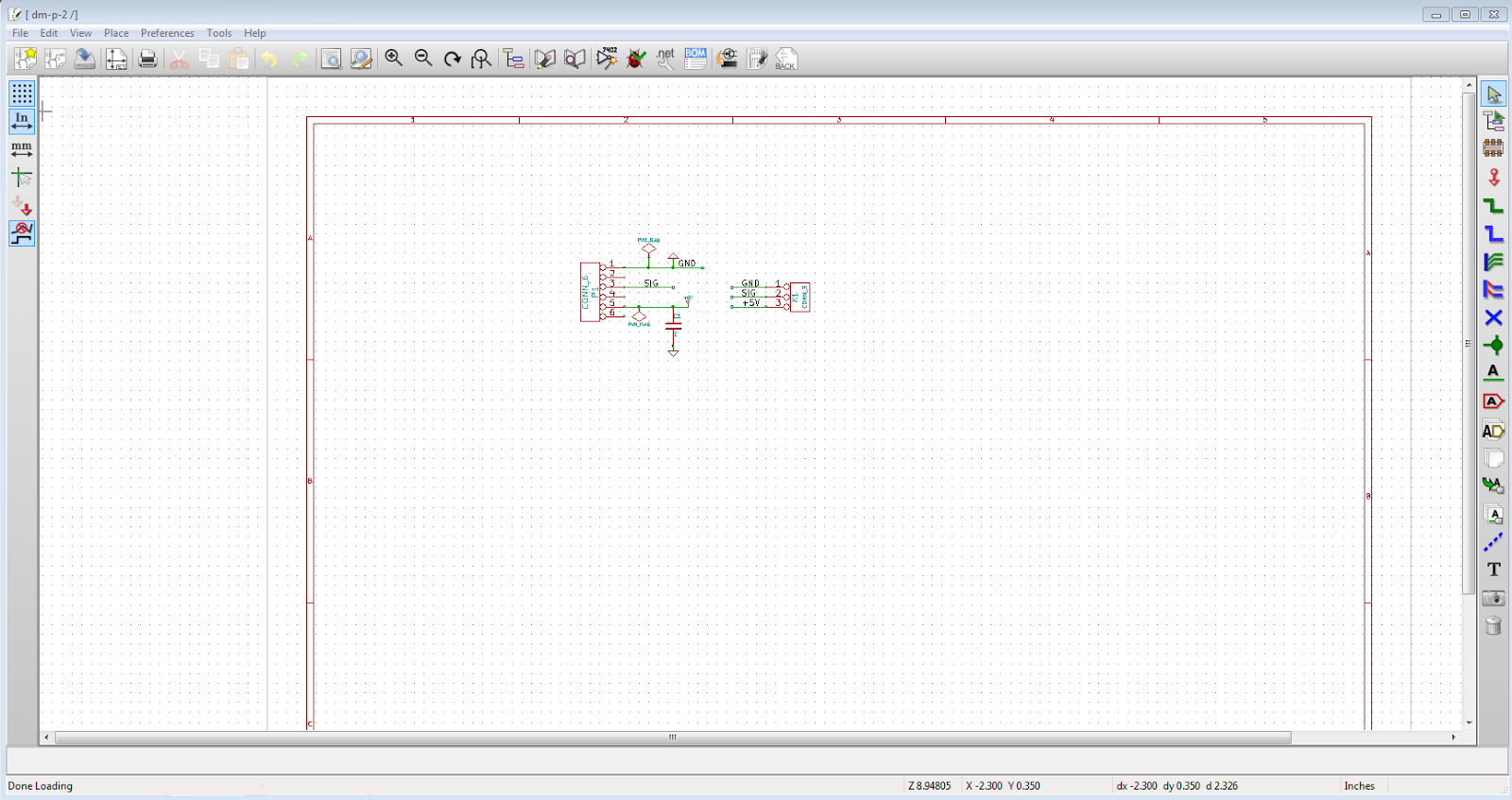
Here's the corresponding property window for the "pinhead" in KiCad
Notice there's a layer selection in this window that wasn't there in Eagle. Since I was used to the style, I didn't even think to change the defaulted top layer section.
Even so I should have caught this when submitting the design to
OSHPark.com. A great feature of their site is that when you upload a project, it will generate a preview of the various different layers.
Here's a previous version of the board (biggest difference being the SMT connector). You can see the gold pads on both the top (left) and bottom (right) layers.
Before ordering, and waiting 2 long weeks, I should have noticed that pads are only on the top (left) layer.
These are things that are taught by experience. Hopefully this helps others to avoid the same issue.